在機器人行業中微型電機應用非常多,如機器人手指關節是通過舵機連接微型電機來進行各種動作。機器人常用的幾種微型電機有有刷直流電機、無刷直流電機、永磁同步電機及步進電機,在常見的機器人產品中,有刷直流電機應用也是比較多的,下面我們來了解下機器人微型電機的選擇要素。
一、微型電機的選擇要求
現在市場上有非常多型號的微型直流電機,生產廠家更是多不勝數,所以在微型電機的選擇過程中性能參數是重點考慮因素,微型電機具有多條運行特性曲線,從機器人產品的角度來看,我們主要考慮工作電壓、轉速、轉矩、電流、物理參數及其他部件參數
1.工作電壓:微型電機會存在多個電壓參數,zui常用的為額定電壓,有的微型電機可以在超過額定電壓運行一段時間,但是不可以長時間運行,不然還是會發熱燒毀;
2.轉速:微型電機每分鐘的旋轉速度;
3.轉矩:微型電機旋轉時候的扭力;
4.電流:微型電機有額定電流、空載電流和堵轉電流參數;
5.物理參數:微型電機的尺寸、軸尺寸等
6.其他參數:微型電機的減速箱參數等

行星減速電機
微型直流電機的供電方式是直流電,所以是可以用電池供電的,這也是直流電機在機器人產品及各種電機產品上應用廣泛的原因,微型電機一般為高速低轉矩運轉,但是機器人產品要求扭矩大,所以需要在微型電機輸出軸之間增加減速器,也叫做齒輪組或減速機,通過減速器可以增加扭力降低轉速,即轉速越低,扭矩就越大,目前的機器人微型電機在生產時廠家都會帶減速機,不需要自己再去裝配,只要把轉速和扭矩參數給到微型電機生產廠家即可。
微型減速電機輸出轉矩高、使用簡單、選擇范圍大,但是精度較低,所以在機器人應用中,需要引入轉速閉環控制,而不可使用開環控制。
二、機器人產品微型減速電機選擇考慮因素
1.通用性:微型電機的通用性越強,價格就會越便宜;
2.工作電壓:工作電壓范圍在6-20v;
3.輸出轉矩:如0.1-0.5Nm之間的輸出轉矩,可用在20-30kg的機器人產品;
4.轉速:如機器人產品是通過輪子運動的,需要的轉速較高,并需要可調速。
還有微型減速電機需要可以正反轉,雖然現在的微型電機都是可以正反轉的,但是有一些電機只能單方向旋轉,所以我們要注意這點參數。
另外,機器人的運行環境因素也對選擇微型電機的選擇也是一個重要考慮范圍,如室外?室內?光滑地面?粗超地面?是否需要爬坡?等等,像掃地機器人是通過微型電機驅動輪胎來進行運動的,所以它的運動速度就取決于微型電機的轉速與輪胎的直徑了。而微型電機的旋轉速度取決于輸入的電壓和負載轉幾乎,在相同的供電電壓下,靠在轉速一家是高于負載轉速的,所以微型電機出力越大,它的轉速就會越低,電流也就越大,當輸出力增大到一定程度的時候,微型電機就會定制旋轉了,這個也就會我們參數中的堵轉,當微型電機電流大時,如果電機長時間堵轉將會引起電機溫度上升,嚴重時會造成電機損壞。
下面為機器人輪胎速度與微型電機旋轉速度關系
V=0.02*pi*w*R/60;
其中:V為機器人運行速度(m/s);
w為經過減速器后電機旋轉速度(rpm);R為電機半徑(cm);
假設我們要求機器人運行平均速度為Vavg,那么要求減速電機轉速為:
w=60*Vavg/(0.02*pi*R)
三、微型電機轉矩要求
如果是機器人運行地面有摩擦及爬坡,那么轉矩的要求就不一樣,假設機器人運行地面摩擦因數為C,機器人質量為m(kg),此時機器人在地面勻速運行要求轉矩為:
T=0.01Ff*R=0.01C*mg*R;
其中Ff為摩擦力(N),R為輪胎半徑(cm);
在勻速運動之外,可能我們還會規定機器人的大爬坡角度theta以及要求的大加速度a等,此時,可以將兩者等效為摩擦,此時:
C=C0+sin(theta)+a/g;
其中,C0為固有的地面摩擦系數,theta為大爬坡解讀,a為大加速度,g為重力加速度;
T=0.01CmgR;
上述1式和2式即為機器人電機轉速和轉矩選擇方法。
四、微型電機的運行條件
當微型電機在開始供電時,微型電機的軸還沒開始旋轉,這個時候電機是處于堵轉狀態的,微型電機電流大為iS,所產生的轉矩也大,所以微型電機開始旋轉,隨著電機的轉速上升,因微型電機反電勢增大,微型電機電流下降、轉矩下降電機轉矩與負載轉矩相等時,電機達到平衡狀態,即為平衡狀態電機轉速。
在機器人中,負載轉矩主要包括摩擦、爬坡、加速等因素,在多人還是比較關心微型電機在不同負載條件下所能達到的zui高轉速。比如在空載條件下微型電機能達到的大轉速,空載轉速為w0;在負載條件下,微型電機堵轉時所能產生的轉速為大轉矩,堵轉轉矩為Ts,在其他條件下,微型電機運行在兩者之間的線性連線上,如果負載為T,那么此時,微型電機的zui高轉速為w=w0×(1-T÷Ts)
假如微型電機zui高轉速為w,那么微型電機所能產生的大轉矩為T=Ts×(1=w÷w0)
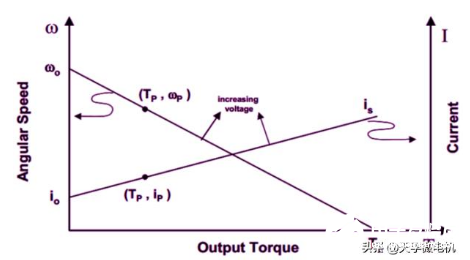
微型電機性能曲線圖
上圖為微型電機的大轉速與大轉矩、轉矩與電流之間的線性關系
微型電機空載zui高轉速為w0,空載電流為i0,隨著負載轉矩的增大,微型電機的轉速便線性下降,電流增大,直到負載轉矩達到大轉矩,微型電機堵轉,在微型電機轉矩為T時,電機的電流為i=i0+(is-i0)×T÷Ts
其中i0為空載電流,is為堵轉電流,Ts為堵轉轉矩
所以在選擇機器人微型電機時我們需要考慮微型電機的運行電壓、空載轉速、一定轉矩下的轉速、一定轉矩下的電流這電流表因素
1. 微型電機的運行電壓:前現我們講過大部分機器人產品微型電機的運行電壓在6~24V,對于小型機器人來說一般使用的是鎳氫電池,電壓在3.6~48不等,對于12V的微型電機一般使用7.2V或者9.6V供電;
2. 微型電機的轉速:一般選擇在額定電壓和額定轉矩下所能滿足條件的微型電機轉速,假如是輪胎尺寸為5-20cm的機器人來說,微型電機的轉速40-300rpm就足夠了;
3.微型電機的轉矩:對于微型電機的轉矩我們一般計算的基礎上留有50%的裕量;另外,如果電機數量多于一個,一般可以對電機轉矩要求除以相應的數量。
4.微型電機的電流:微型電機的電流決定著機器人的運行時間,一般是根據微型電機的電流數據就可以大概評估其應用范圍,如0.01A的微型電機,就適合于大多數機器人人產品;
還有一個尺寸問題,設計機器人產品時要確保微型電機能夠安裝
(來源:網絡,版權歸原作者)

